最终的效果图是这样的:
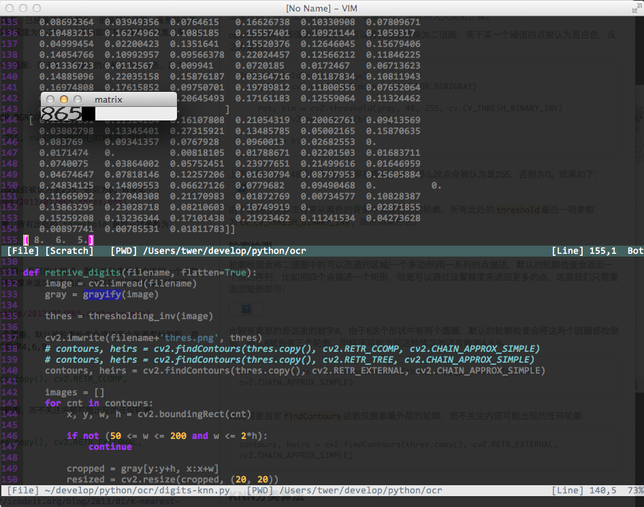
图中的一个小的窗口中为resize之后的所有找到的图片的列表,在这个case中,有三个数字。
数字识别即将图片中的数字通过计算机算法识别为文本。如果要从头写一个识别器,可能需要很多的实践,花费很大的精力,而且还需要有良好的数学功底才能完成,不过使用opencv提供的丰富的API和算法实现,可以比较容易的做到,而且也可以得到比较高的精确率。
数字识别是模式识别中的一个特例,我这里要讨论的是一个比较简单的实现,基于最简单也最容易理解的KNN算法(请参看之前的一篇文章)。
数字识别和其他的所有计算机视觉相关的应用都会分为两个步骤:ROI抽取和识别。
1. ROI抽取即将感兴趣的区域从原始图像中分离初来,这个步骤包括二值化,噪点的消除等
2. 识别即通过一些分类器将第一步中的结果进行分类,事实上属于机器学习的一个典型应用
###图像预处理
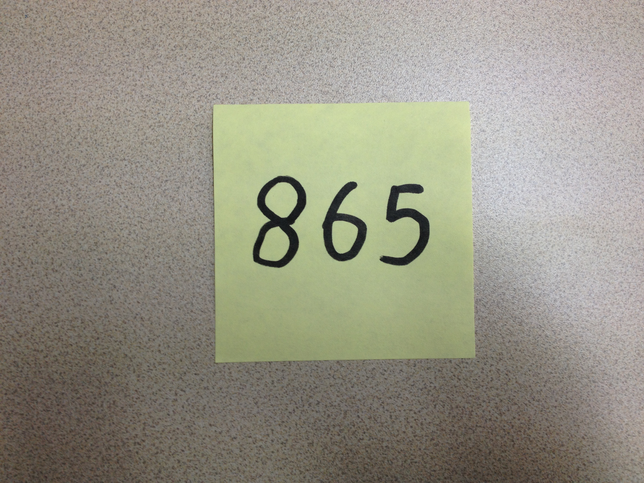
原始图片中会有大量与目标无关的信息,比如人脸检测中,背景中往往有诸如桌椅,墙壁上的画,或者在户外的树木,动物等等,这些与目标无关的信息被称为噪音或者噪点,应该在进行分类之前通过一些特定的步骤来消除,不但可以减少计算量,而且还可以提高准确率。
####灰度图 通常的彩色图形由3个(RGB)或者4个(RGBA)通道组成,在计算机看来,一个彩色的图片是由3/4个矩阵组成,每个矩阵中包含若干个点(比如1024x768),如果每个通道都参与运算的话,会引入太多的计算量,因此通常的做法是将彩色图像转换为灰度图,在opencv中,这一步非常容易:
def grayify(image):
return cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
####二值图 灰度图较之原始图片,将三个维度的矩阵变成了一个维度,已经做了部分简化,但是算法来说,噪音并未消除,灰度图中,每个点仍然有8位来表示,每个点可能的灰度为0-255,二值图即将灰度图转换成黑白图,每个点只有两种可能:非黑即白,这样将大大简化计算。
opencv提供了阈值调节的API,可以将灰度图转换为二值图:高于某一个阈值的点被认为是白色,反之为黑色:
def thresholding_inv(image):
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
ret, bin = cv2.threshold(gray, 48, 255, cv.CV_THRESH_BINARY_INV)
bin = cv2.medianBlur(bin, 3)
return bin
上面的代码中,48即为阈值,如果灰度高于48,那么改点会被认为是255,否则为0。效果如下:
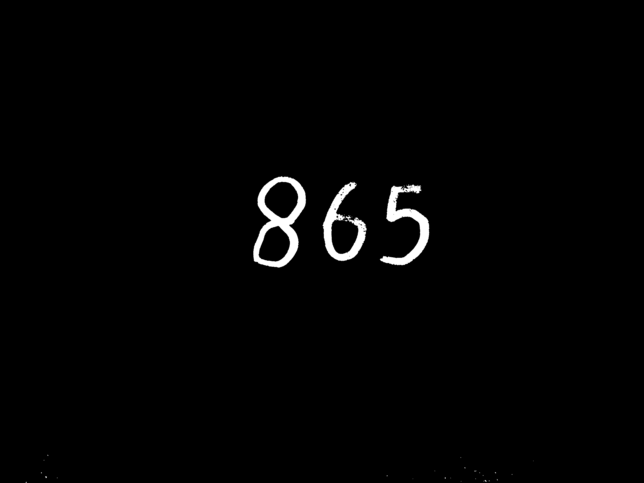
由于轮廓检测算法需要从黑色的背景中搜索白色的轮廓,所有此处的threshold最后一项参数为cv.CV_THRESH_BINARY_INV,即反转黑白色。
####轮廓检测 轮廓检测会将二值图中的可以连通的区域(一个多边形)用一系列的点描述,默认的轮廓检查会返回一个点的序列,比如用四个点描述一个矩形,但是可以通过设置精度来返回更多的点,这里我们只需要返回矩形即可:
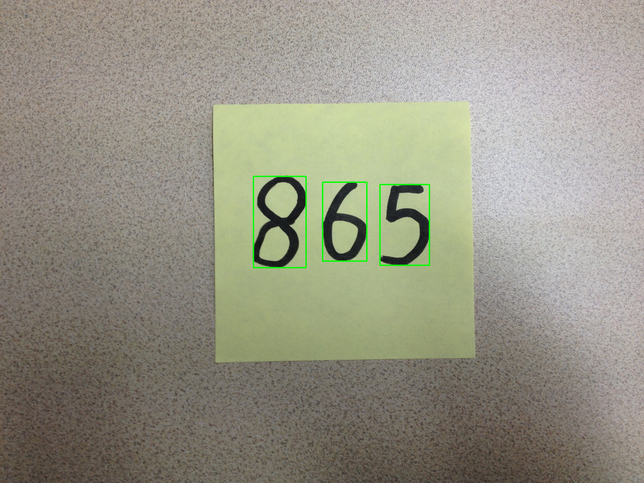
比较有意思的是这里的数字8,由于8这个形状中有两个圆圈,默认的轮廓检查会将这两个圆圈都检测到,那么8就会有三个轮廓,同样还可能出现这种情况的还有数字4,6,9。
contours, heirs = cv2.findContours(thres.copy(), \
cv2.RETR_CCOMP, cv2.CHAIN_APPROX_SIMPLE)
因此需要指定findContours函数仅搜索最外层的轮廓,而不关注内部可能出现的任何轮廓:
contours, heirs = cv2.findContours(thres.copy(), \
cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
###KNN分类算法 KNN算法的原理可以参看之前的一篇文章。这里的实现主要参考了opencv的示例程序:
class KNearest(StatModel):
def __init__(self, k = 3):
self.k = k
self.model = cv2.KNearest()
def train(self, samples, responses):
self.model = cv2.KNearest()
self.model.train(samples, responses)
def predict(self, samples):
retval, results, neigh_resp, dists = \
self.model.find_nearest(samples, self.k)
return results.ravel()
####数字的顺序 另外一个有意思的事情是轮廓检测的时候,算法并不一定按照从左到右,从上到下的方向进行,我开始只是简单的按照迭代的顺序将结果插入到一个list中,但是这样list中的结果是乱的,下午得到了team中有图像处理背景的杨眉同学的支持:搜索到轮廓的时候,将此时的position信息与轮廓一起记录下来,然后在搜索完成之后,将整个列表按照x坐标排序(卡上的数字是按照从左向右书写):
class PosImage(object):
def __init__(self, pos, image):
self.pos = pos
self.image = image
def get_position(self):
return self.pos
def get_image(self):
return self.image
然后在迭代中记录position信息:
cropped = gray[y:y+h, x:x+w]
resized = cv2.resize(cropped, (20, 20))
cv2.rectangle(image, (x, y), (x+w, y+h), (0, 255, 0), 3)
pos_image = PosImage((x, y), resized)
images.append(pos_image)
最后做一次新的arrange:
def rearrange(images):
return sorted(images, cmp=lambda x, y:
cmp(x.get_position()[0], y.get_position()[0]))